I WORK IN AUTONOMOUS DRIVING VEHICLE TEAM
Here are some of my works at ITRI
Data Collection Vehicle - S3

This is the very first vehicle that I managed during my internship. Starting from setting up OS, I handle the process all the way to network architechture and drivers. There are various sensors on this vehicle and it changes frequently as the demands changes. Ususally, there are LiDARs (optical sensors detecting time of flight at each angle and output as 3D points), Cameras (visual sensors with image output), Automotive Radars (radar sensor decoding the return waves to object distances and speed), Scanning Radar (a special radar form. It continuously scans over different azimuth angles and returns dense measurements.)
(Video of Collected Data)Data Collection Vehicle - RAV4
This is another vehicle that I've used to collect data. RAV4 is usually for mapping purpose. In the link below, we've setup a Radar and Lidar system to collect data for testing localization and detection. There is one regular lidar sensor and two solid state lidar produced by Velodyne, Baraja and Livox. The radar can sense over 500 meters long and achieve 1.8 degree accuracy.
(Video)
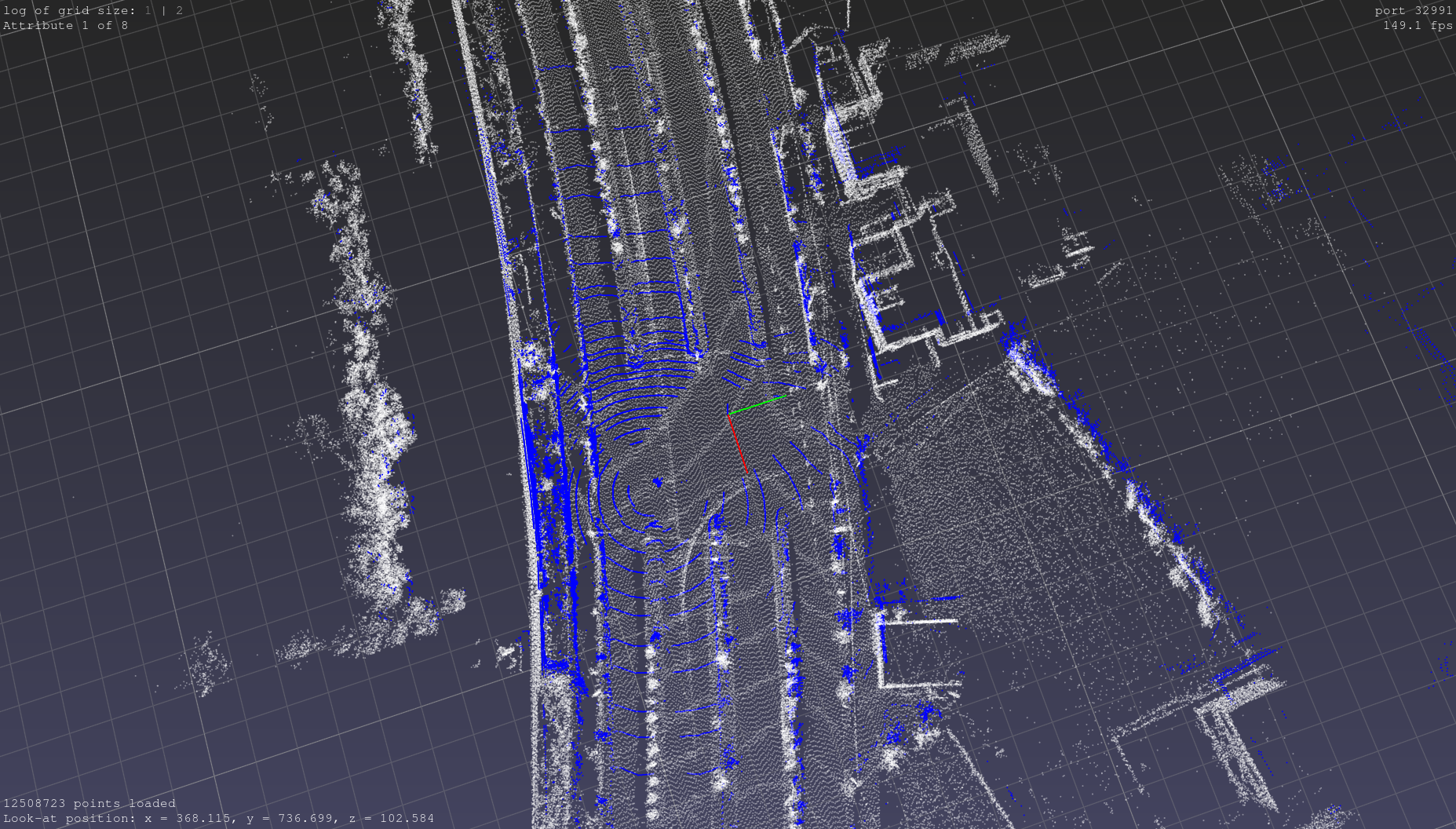
LiDAR Based Pole Point Detection
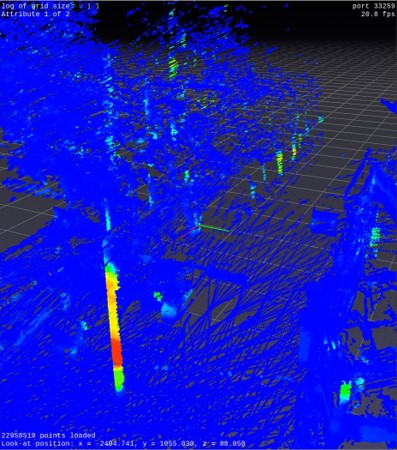
Coming Soon
Localization with Pole Objects
Comming Soon