My Recent Completed Projects
My interest is to create new stuffs. Checkout what I've recently done.
Note. Some of those are not completed on my own.
Click on the title to see more about it.
Phonebot: A Project Aims for Create A Phone-Driven Robot
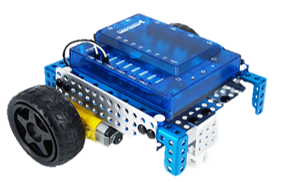
Robot is always a high-end technology which is hard to learn and difficult to get familiar with. Phonebot is a brand new concept intends to change the relationship between human and robot. Our team wishes to build a cheap, lightweight and easy-to-use robot controlled by normal mobile phone. In this project, we design a 3D-printable structure equipped with Matrix-MINI, an arduino-based board design by Matrix Corp. With the connection via bluetooth, it is easier to control a robot without learning many skills.
Team members: Sheng-Cheng Lee, Jun-han Chen, Zung-Ting Thai, Chuan-Cheng Liang
(Poster)NDSR: Nuclear Disaster Strain Robot
Nowadays, more and more robots are capable with a lot of skills, e.g. self-driving, cooking, guiding...etc. While people try to equipped them with skills which we all can do, few people think about to have them achieve some mission people cannot do. Nuclear Disaster Strain Robot (NDSR) is a project trying to extend the ability of robot, making them explore into the area where is destroyed with a nuclear disaster. NDSR combines two technologies, which is localization and perception. Using NVIDIA Jetson Nano as computing unit, we mount a depth camera to detect artifacts in a ruined city and a UWB localization device to acquire the location information.
Team members: Sheng-Cheng Lee, Po-Kai Chang
(Report) (Video)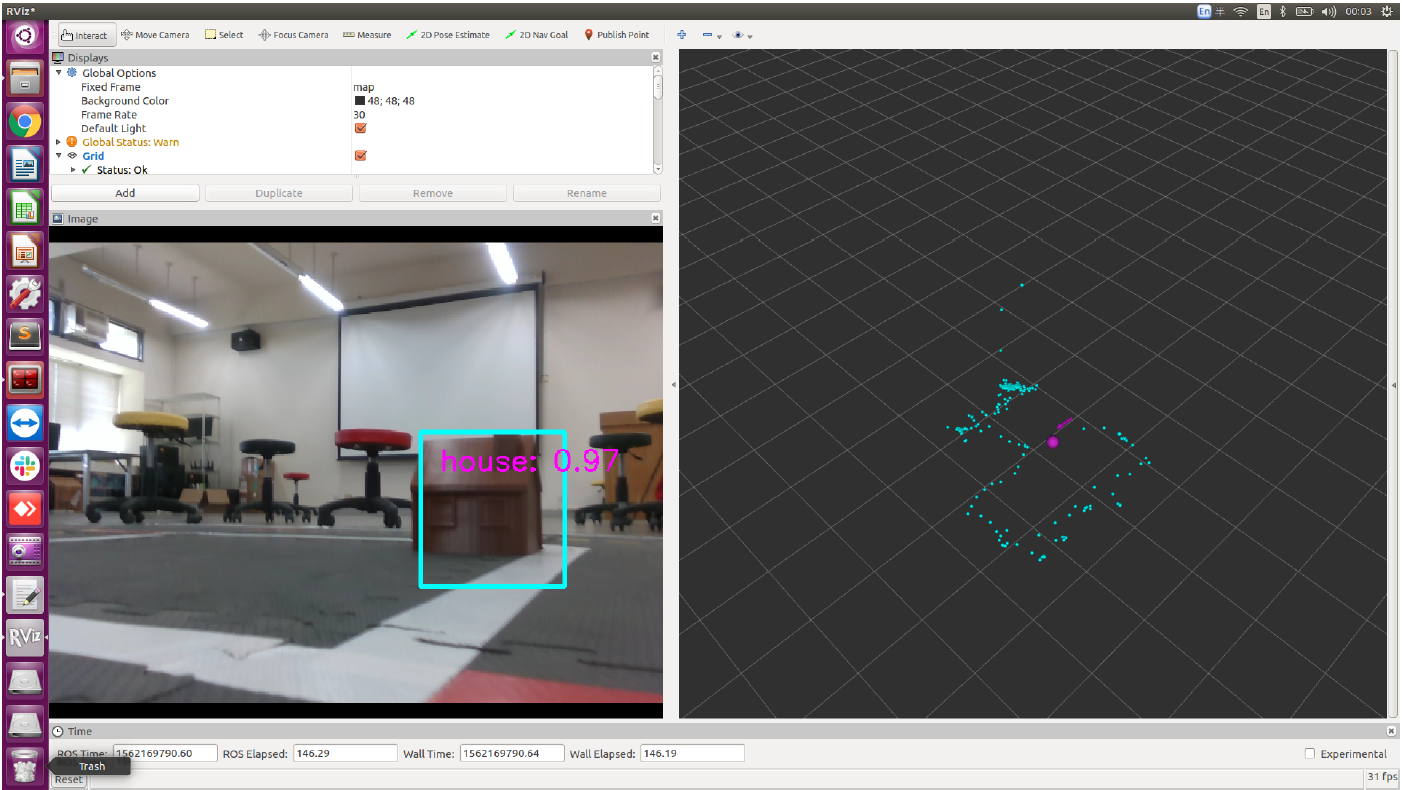
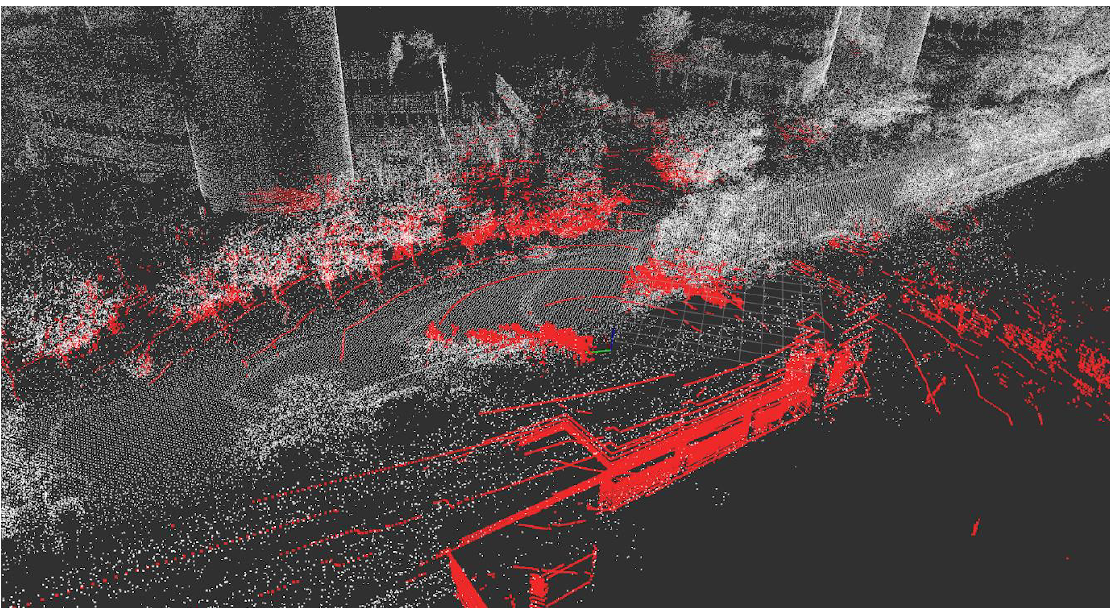
UELS: Unknown Environmnet Localization System
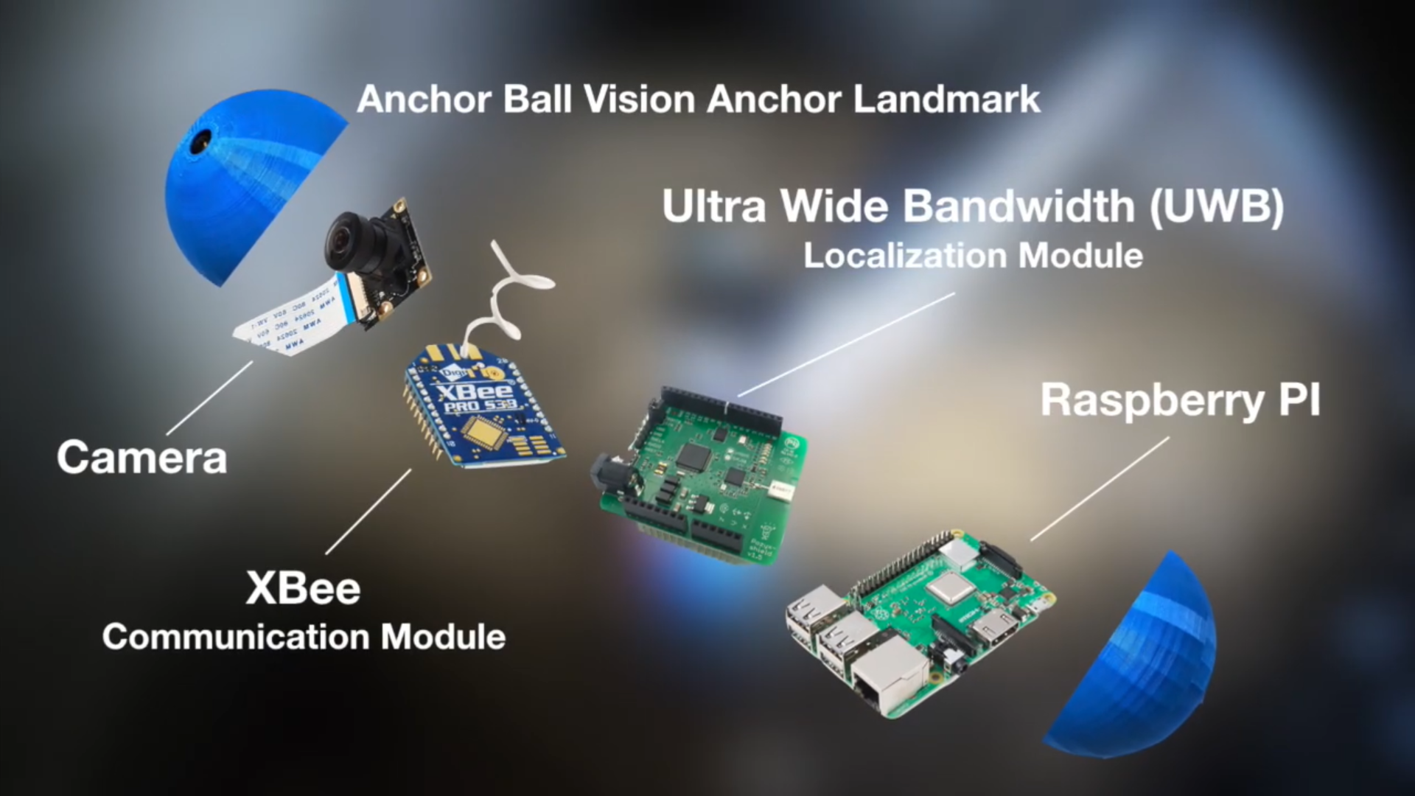
Simultaneous localization and mapping (SLAM) is always a big issue in robot control. This project is about the concept of improving the SLAM result by deploying anchor nodes into an unknown environment. Anchor Ball is an active, intercommunicative Landmark, which contains an embedded computer along with a wide-angle camera, xBee in use of communication, and an Ultra-Wide Bandwidth (UWB) Antenna to provide accurate localization result. By detecting AprilTags with camera and localize the UWB tag, we are able to decrease the accumulating error of SLAM and improve the efficiency of map exploring. The concept is still being verified in DARPA SubT Challenge.
(Poster)